Mise en marche du robot
Les coordonnées cartésiennes
Dans le logiciel, le robot peut se piloter en coordonnées cartésiennes :
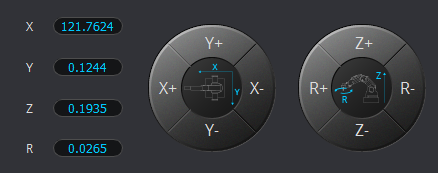
Nous allons, dans cette partie, déterminer à quoi correspondent les valeurs affichées dans le logiciel Dobot Studio.
- Démarrer le logiciel Dobot studio.
- Alimenter le robot en courant avec l'alimentation fournie.
- Brancher le câble USB entre le PC et le robot.
- Allumer le robot :
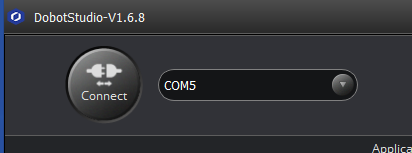
- Le PC doit trouver le robot sur un port COM :
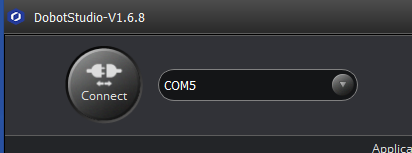
- Se connecter à l'aide du bouton :
Pour commencer il faut que le robot se repère dans l'espace à l'aide d'une procédure de Prise d'Origine Machine (POM).
- Libérer l'espace autour du robot.
- Appuyer alors sur le bouton
 . Attention le robot va se mettre à bouger pour chercher son zéro.
. Attention le robot va se mettre à bouger pour chercher son zéro.
Créé avec HelpNDoc Personal Edition: Création d'aide CHM, PDF, DOC et HTML d'une même source