Montage du doigt
Il s'agira maintenant de monter votre pince sur l'ensemble. Pour réaliser des études mécaniques, Inventor raisonne par classe d'équivalence.
Télécharger le fichier Robot_Dobot.zip et l'extraire. Après avoir ouvert Inventor, charger le fichier Pince.iam (remarquer que l'extension d'un fichier d'assemblage n'est pas la même que celle d'une pièce unique) situé dans le dossier Pince-robot-Dobot.
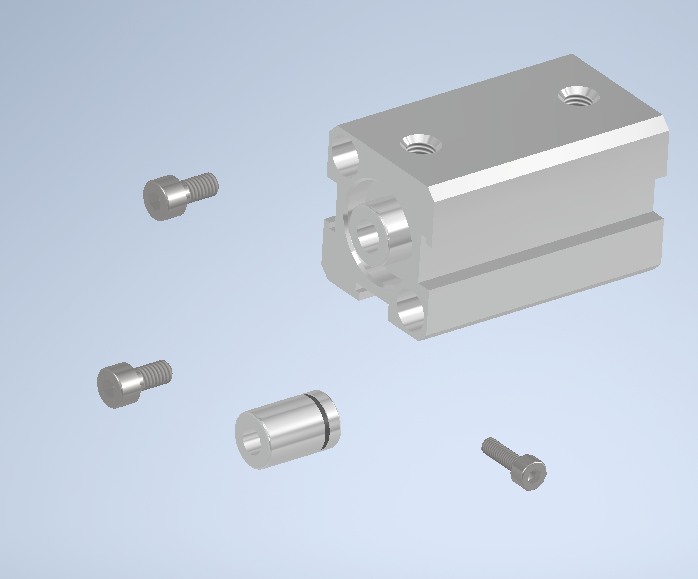
Dans un assemblage, il faut placer les pièces une par une et les lier par des Contraintes.
Conseil : copier le doigt dessiné précédemment dans le répertoire de la pince.
Faire  puis choisir votre pièce. Celle-ci doit apparaître sur l'assemblage.
puis choisir votre pièce. Celle-ci doit apparaître sur l'assemblage.
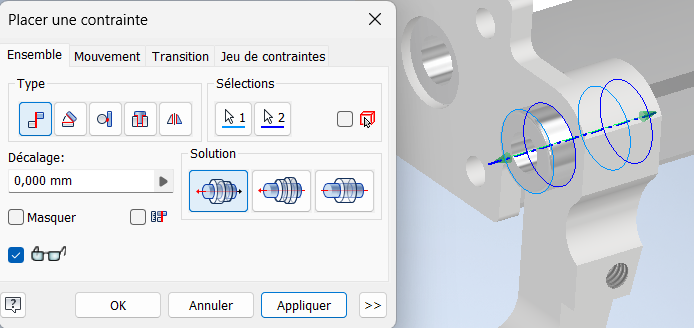
Faire  puis désigner les plans permettant de coller les pièces l'une à l'autre. Appliquer.
puis désigner les plans permettant de coller les pièces l'une à l'autre. Appliquer.
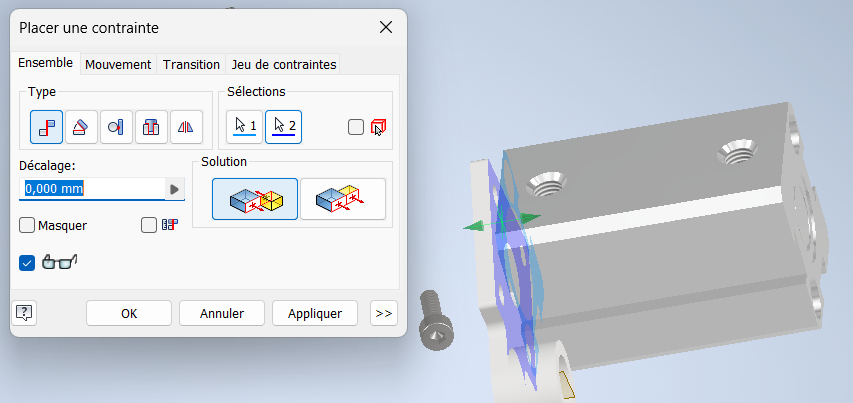
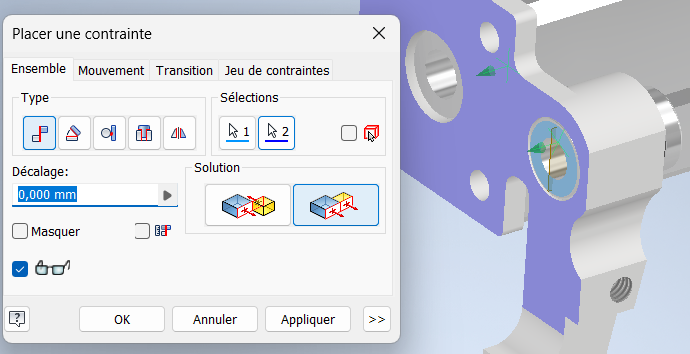
Il faut ensuite faire un affleurement c'est à dire positionner les deux plans dans le prolongement l'un de l'autre.
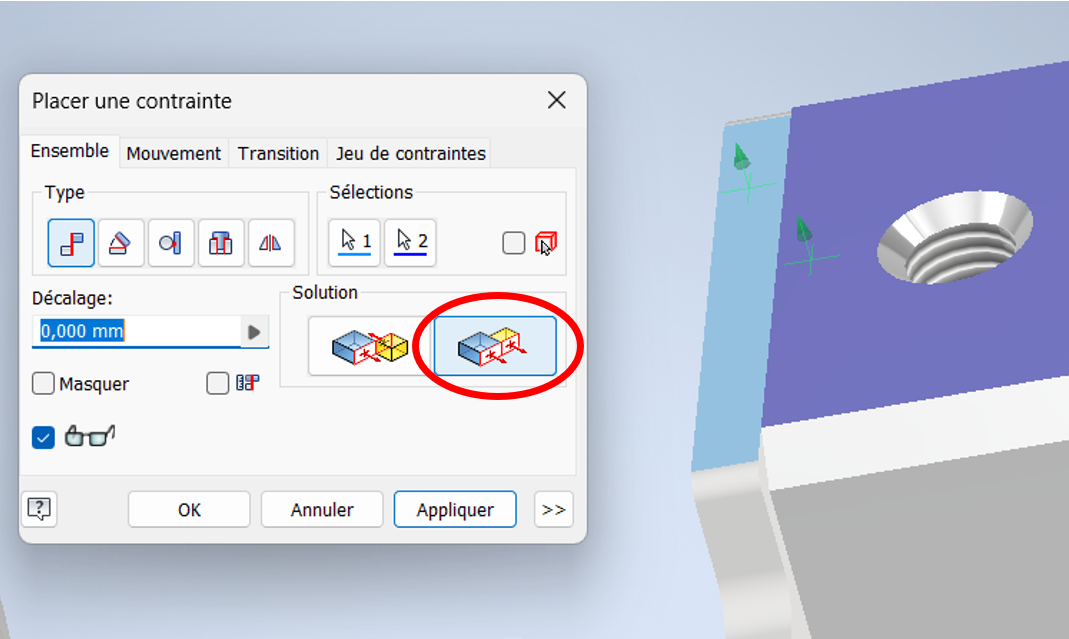
Les deux pièces sont positionnées en translation, il reste un degré de liberté. Faire un affleurement supplémentaire pour immobiliser les pièces l'une par rapport à l'autre.
Positionner maintenant la douille à billes avec le doigt. De la même façon, faire Contraintes.
Puis faire un affleurement.
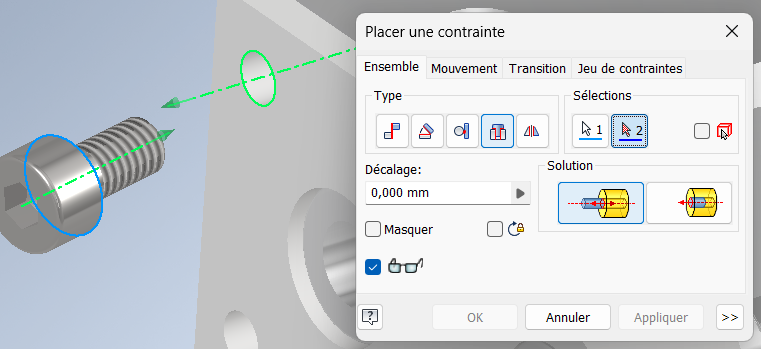
Les vis peuvent être installées avec un logement.
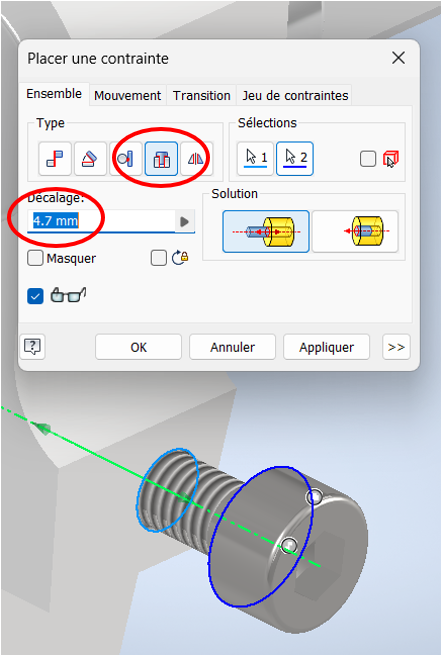
La vis suivante se positionne à 4.7 mm du bord.
Enregistrer votre travail puis ouvrir le fichier robot-Meca.iam dans le dossier Robot-meca.
Créé avec HelpNDoc Personal Edition: Faites de la documentation d'aide un jeu d'enfant avec un outil de création d'aide