Etude des déplacements sur Inventor
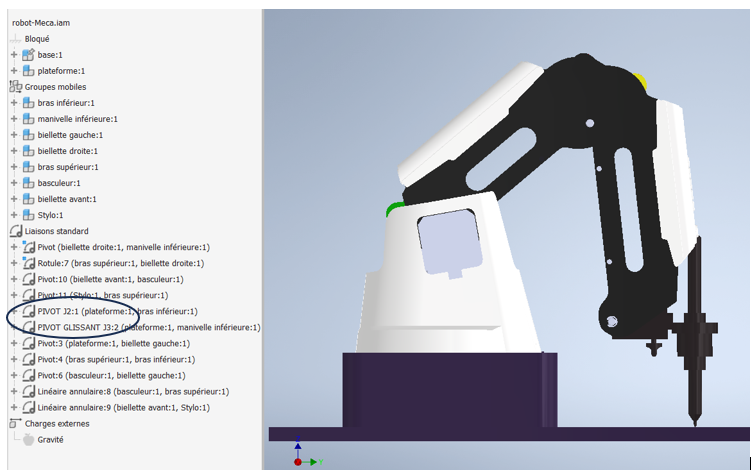
Charger le fichier Robot-méca.iam. Le modèle est représenté dans la situation initiale voulue par l’étude réelle. Faire Environnements – Simulation dynamique. Dans l’arbre de construction apparaissent les liaisons qui constituent le robot. Les deux liaisons sur lesquelles nous allons travailler sont écrites en majuscules.
- Commander des positions sur Inventor.
Pour modifier une succession de positions sur Inventor, cliquer avec le bouton de droite sur une liaison et faire Propriétés. Suivre les indications suivantes :

Remplir le tableau de façon qu’à chaque seconde corresponde une valeur angulaire du moteur. Pour ajouter un point, cliquer dans la zone blanche avec le bouton de droite de la souris.
Faire de même avec le moteur J3.
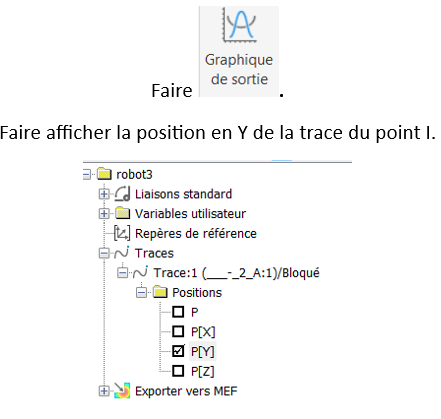
- Récupération des résultats
Lancer le lecteur de simulation sur 11 secondes (ce qui doit correspondre au nombre d’essais réalisés :

Créé avec HelpNDoc Personal Edition: Avantages d'un outil de création d'aide